EGR 101 in class Project
Fetch-bot
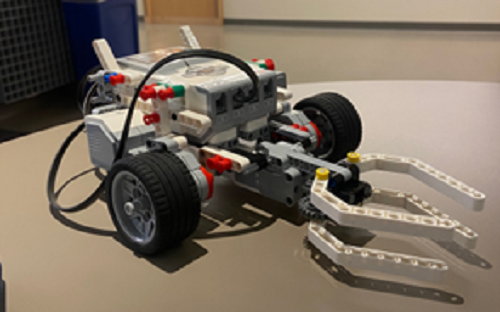
Our robot goes to the desired location and retrieves your items for you.
The process works when the user presses the desired input from the keypad, and the robot moves to that location.
Then the robot picks up an object and returns it.
Fetch robot can be programmed to detect various colors, pick up objects, and bring them back to the owner. This can be useful if a person has left their coffee cup across the house or to grab a snack without getting up. There are plenty of other uses for this robot
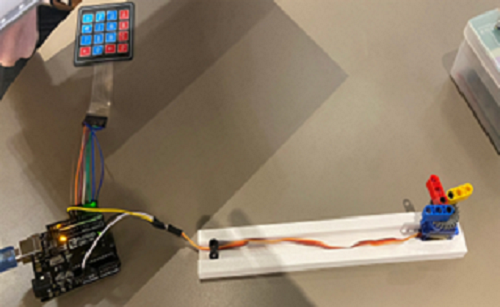
Our code is mainly based around the keypad, with half the entire length devoted to the setup. We used a simple switch statement with the cases lining up with the number pressed to determine which color is rotated to show the robot. Depending on the color, our robot will go to a specific location where an object is located.
EGR 102 in class Project
Sensing-robot
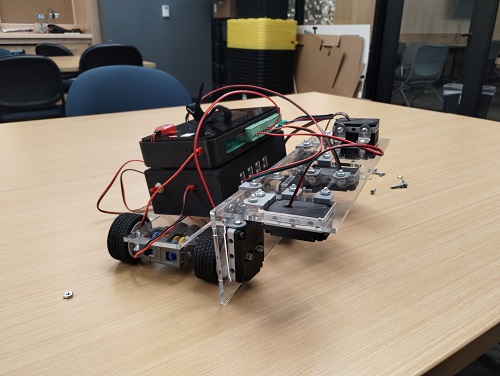
The project involves making a bet on which team can collect exact targeting balls. There are a total of three robots per team, including two sensing robots and one ball collecting robot. One of the tasks for our team is to develop a sensing robot that can read how many points our team needs to collect.
This robot has a total of 6 sensors, including 2 distance sensors, 2 voltage sensors, and 2 light sensors. It is capable of detecting and reading values from these sensors within the arena. The robot is also able to move by using a remote controller.